main( ) 偺僉儌偺偲偙傠傪愢柧
仠include偵偼丄偍偒傑傝偺 stm8s.h
偼偐側傜偢婰弎偟偰偍偒傑偡丏
偁偲丄GPIO偺價僢僩撉傒儖乕僠儞傪帺嶌偟傑偟偨偺偱丄gpio.h 傕婰弎偟偰偍偒傑偡丏
#include "stm8s.h"
#include
"gpio.h"
仠128000偲偄偆偺偼丄俀偮偁傞STM8S撪憼僋儘僢僋僆僔儗乕僞偺偆偪丄掅懍僋儘僢僋僆僔儗乕僞偺廃攇悢偱偁傞丄128kHz偺偙偲傪堄枴偟偰偄傑偡丏
俀侽偲偄偆偺偼丄俀侽俫倸偱僞僀儅妱傝崬傒偝偣傞偲偄偆堄枴偱偡丏捠揹帪娫傪寛傔傞偨傔偵妱傝崬傒傪棙梡偡傞偨傔偱偡丏
ARR
偲偄偆寁嶼幃偼丄俀侽Hz偺妱傝崬傒傪偡傞偨傔偵丄僞僀儅偼128kHz傪壗夞僇僂儞僩偡傟偽傛偄偺偐傪寁嶼偡傞偨傔偺幃偱偡丏偙偺応崌偱偡偲丄6400僇僂儞僩偝偣傞偙偲偵側傝傑偡丏
#define PRS_Hz 128000 //
prescaler output freq.
#define INT_Hz
20 //
interrupt freq.
#define ARR
(int)((float)PRS_Hz/(float)INT_Hz) // 16bit counter max
value
仠CPU僋儘僢僋傪愝掕偟傑偡丏僉儌偺偲偙傠偼丄CLK_SOURCE_LSI
偱偡丏LSI偲偄偆偺偑丄128kHz偺撪晹僋儘僢僋僆僔儗乕僞傪昞偟偰偄傑偡丏僋儘僢僋愝掕偵偮偄偰徻偟偄偙偲偼丄偙偪傜偺夝愢
傪撉傫偱偔偩偝偄丏
CLK_ClockSwitchConfig( CLK_SWITCHMODE_AUTO,
CLK_SOURCE_LSI, DISABLE, CLK_CURRENTCLOCKSTATE_DISABLE
);
仠GPIO偺掕媊丏 億僀儞僩僗僀僢僠偺偨傔偺擖椡億乕僩傪俀儢梡堄偟傑偡丏
GPIO_Init(GPIOE,
GPIO_PIN_3, GPIO_MODE_IN_PU_NO_IT); // right sw
GPIO_Init(GPIOE,
GPIO_PIN_2, GPIO_MODE_IN_PU_NO_IT); // left
sw
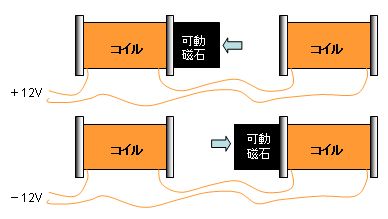
仠GPIO偺掕媊丏 摦嶌儌僯僞偺偨傔偺俴俤俢偺偨傔偺弌椡億乕僩傪丄GPIOD偲GPIOE偵俆儢梡堄偟傑偡丏晄梫側傜嶍彍偟偰偟傑偭偰傕栤戣側偄偱偡丏
GPIO_Init(GPIOD,
GPIO_PIN_7, GPIO_MODE_OUT_PP_HIGH_SLOW); // LED
GPIO_Init(GPIOD,
GPIO_PIN_5, GPIO_MODE_OUT_PP_HIGH_SLOW); // LED
GPIO_Init(GPIOD,
GPIO_PIN_3, GPIO_MODE_OUT_PP_HIGH_SLOW); // LED
GPIO_Init(GPIOD,
GPIO_PIN_0, GPIO_MODE_OUT_PP_HIGH_SLOW); // LED
GPIO_Init(GPIOE,
GPIO_PIN_0, GPIO_MODE_OUT_PP_HIGH_SLOW); //
LED
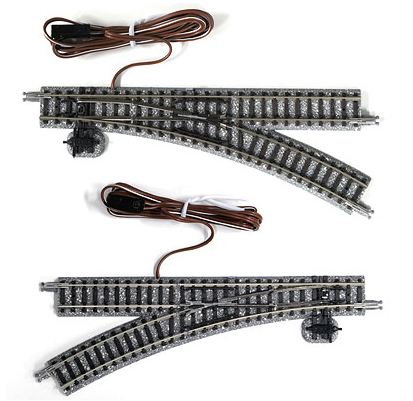
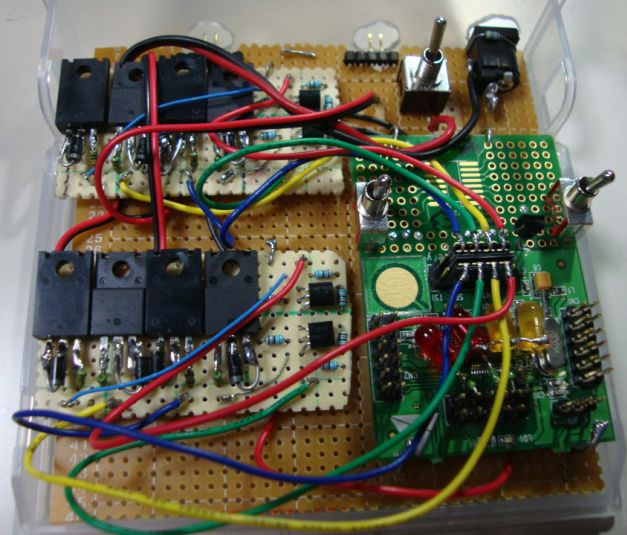
仠GPIO偺掕媊丏 俫僽儕僢僕傪嬱摦偡傞偨傔偺弌椡億乕僩傪GPIOD偵俉儢梡堄偟傑偡丏
俫僽儕僢僕侾儢偁偨傝係杮傕偺惂屼怣崋偑昁梫偱丄偦傟偑俀夞楬偁傞偺偱丄俉弌椡億乕僩偑昁梫偱偡丏
偙偺斚嶨偝偑俫僽儕僢僕夞楬傪惢嶌偡傞偆偊偱偐偭偨傞偄偲偙傠偱偡丏
// bit7531 ---> actuator left
H bridge
// bit6420 ---> actuator right H bridge
GPIO_Init(GPIOB, 0b11111111, GPIO_MODE_OUT_PP_LOW_FAST); //
actuator
bit7,5,3,1 偑丄嵍懁偺億僀儞僩愗懼僗僀僢僠偵懳墳偡傞俫僽儕僢僕偺惂屼慄偱偡丏
bit6,4,2,0
偑丄塃懁偺億僀儞僩愗懼僗僀僢僠偵懳墳偡傞俫僽儕僢僕偺惂屼慄偱偡丏
仠僞僀儅偺愝掕
TIM2_TimeBaseInit( )
偼丄僾儕僗働乕儔偼巊傢偢偵丄6400夞僇僂儞僩偟偰偹偲巜帵偟偰偄傑偡丏
TIM2_ITConfig( )
偼丄僞僀儅偺僇僂儞僞偑僆乕僶乕僼儘乕偟偨傜丄偡側傢偪6400夞僇僂儞僩偟偨傜丄僞僀儅俀
妱傝崬傒傪敪惗偝偣偰偔傟丄偲巜帵偟偰偄傑偡丏
TIM2_Cmd(
) 偼丄僞僀儅俀偵摦偗偲巜帵偟偰偄傑偡丏
TIM2_TimeBaseInit( TIM2_PRESCALER_1, ARR-1
);
TIM2_ITConfig(TIM2_IT_UPDATE, ENABLE);
TIM2_Cmd(ENABLE);
僞僀儅偵偮偄偰徻偟偄偙偲偼丄偙偪傜 傪嶲徠偟偰偔偩偝偄丏
仠僷儚乕僆儞捈屻偺偄傑丄億僀儞僩愗懼僗僀僢僠偑偳偭偪偵搢傟偰偄傞偺偐傪丄撉傒偲傝傑偡丏
state_left
=GPIO_ReadPin(GPIOE, GPIO_PIN_2); // sw left
state_right=GPIO_ReadPin(GPIOE, GPIO_PIN_3); // sw
right
仠enableInterrupts(); 偱丄僞僀儅妱傝崬傒傪僆儞偵偟傑偡丏
仠 while(1){}
偼丄塱媣偵儖乕僾偟偮偯偗傑偡丏慡偰偺惂屼偼丄僞僀儅妱傝崬傒儖乕僠儞偱張棟偝傟傑偡丏
僞僀儅妱傝崬傒儖乕僠儞偺僉儌偺偲偙傠傪愢柧
仠@far @interrupt void
Tim2Update_isr(void)
20Hz亖0.05昩偛偲偵妱傝崬傒張棟偡傞儖乕僠儞
仠師夞偺妱傝崬傒弨旛偺偨傔TIM2妱傝崬傒僼儔僌傪僋儕傾偡傞偍傑偠側偄傪偟傑偡丏
TIM2_ClearFlag(TIM2_FLAG_UPDATE);
仠妱傝崬傒儌僯僞俴俤俢傪揰柵偝偣傑偡丏億乕僩弌椡傪斀揮偝偣傞娭悢偱偡丏
GPIO_WriteReverse(GPIOD,GPIO_PIN_0);
仠嵍懁億僀儞僩愗懼僗僀僢僠傪惂屼偡傞僔乕働儞僒儖乕僠儞偱偡丏
switch(seqL){
仠嵍懁億僀儞僩愗懼僗僀僢僠傪撉傒偲傝傑偟偰丄CPU偑彸抦偟偰偄傞忬懺偐傜曄壔偑偁偭偨傜僗僀僢僠偑憖嶌偝傟偨偲敾抐偟丄seqL傪僀儞僋儕儊儞僩偟偰丄僔乕働儞僗傪侾偵恑傔傑偡丏偦偟偰丄妱傝崬傒儖乕僠儞偐傜偼扙弌偟傑偡丏
case
0: {
sw_left=GPIO_ReadPin(GPIOE,
GPIO_PIN_2);
if(state_left!=sw_left);
seqL++;
break;
}
仠師偺妱傝崬傒偡側傢偪0.05昩屻偵偼丄僔乕働儞僗亖侾側偺偱丄偙偙偵摓払偟傑偡丏傕偆偄偪偳丄嵍懁億僀儞僩愗懼僗僀僢僠傪撉傫偱丄CPU偑彸抦偟偰偄
傞忬懺偲摨偠偩偭偨傜丄僠儍僞儕儞僌偵傛傞娫堘偄忣曬偩偭偨傫偩偲敾抐偟偰丄僔乕働儞僗亖侽偵栠偟偰丄側偵傕偣偢偵丄妱傝崬傒傪扙弌偟傑偡丏
師偵丄嵍懁億僀儞僩愗懼僗僀僢僠偑侽偐侾偐偱丄張棟偑暘婒偟傑偡丏侽偺帪偩偗愢柧偟傑偡偲丄傑偢丄曅曽偺儌僯僞LED傪岝傜偣傑偡丏師偵丄俫僽儕僢僕偺惂屼億乕僩偱偁傞
GPIOB傪曄壔偝偣傑偡丏嵍懁億僀儞僩愗懼僗僀僢僠偵懳墳偡傞俫僽儕僢僕偼丄GPIOD偺bit 7,5,3,1 偵攝慄偟偰偁傝傑偡丏bit
7,1傪LOW偵偟丄bit 5,3 傪 HIGH 偵偟偰丄捠揹偟傑偡丏
億僀儞僩愗懼僗僀僢僠偑侾偺帪偼丄bit 7,1傪HIGH偵偟丄bit 5,3 傪
LOW
偵偡傞偙偲偱丄媡嬌惈偱捠揹偟傑偡丏
枛旜偱偼丄崱捠揹偟偨忬懺傪丄CPU偑彸抦偟偰偄傞忬懺偵僙僢僩偟偰偐傜丄僔乕働儞僗亖俀偵偟偰妱傝崬傒傪扙弌偟傑偡丏
case
1: {
sw_left=GPIO_ReadPin(GPIOE,
GPIO_PIN_2);
if(state_left==sw_left){ seqL=0; break; } //
no
action
if(sw_left==0){
GPIO_WriteHigh(GPIOD,GPIO_PIN_7); //
monitor LED
GPIO_WriteLow (GPIOD,GPIO_PIN_5); //
monitor LED
tmp =
GPIO_ReadInputData(GPIOB);
tmp = tmp &
0b01010101;
tmp = tmp |
0b00101000;
GPIO_Write(GPIOB, tmp); //
actuator
}
else{
GPIO_WriteLow
(GPIOD,GPIO_PIN_7); // monitor
LED
GPIO_WriteHigh(GPIOD,GPIO_PIN_5); // monitor
LED
tmp =
GPIO_ReadInputData(GPIOB);
tmp =
tmp &
0b01010101;
tmp = tmp |
0b10000010;
GPIO_Write(GPIOB, tmp); //
actuator
}
state_left=sw_left;
seqL++;
break;
}
仠師偺妱傝崬傒偡側傢偪0.05昩屻偵偼丄僔乕働儞僗亖俀側偺偱丄偙偙偵摓払偟傑偡丏
儌僯僞俴俤俢傪徚摂偟傑偡丏
俫僽儕僢僕惂屼怣崋偱偁傞GPIOD
bit7531傪慡晹僛儘偵偟偰丄捠揹傪廔傢傜偣傑偡丏偮傑傝丄侽丏侽俆昩偟偐捠揹偟側偄傢偗偱偡丏
枛旜偱僔乕働儞僗傪僀儞僋儕儊儞僩偟偰偄傑偡偑丄偙傟偼丄僛儘偵偡傞傋偒偱偡偹丏幚奞偼側偄偱偡偑丄僶僌偱偡丏
orz
妱傝崬傒偐傜扙弌偟傑偡丏
case 2:
{
GPIO_WriteHigh(GPIOD,GPIO_PIN_7); // monitor
LED
GPIO_WriteHigh(GPIOD,GPIO_PIN_5); // monitor
LED
tmp =
GPIO_ReadInputData(GPIOB);
tmp = tmp &
0b01010101;
GPIO_Write(GPIOB, tmp); // actuator
off
seqL++;
break;
}
仠師偺妱傝崬傒偡側傢偪0.05昩屻偵偼丄僔乕働儞僗亖俁側偺偱丄偳偙偵傕峴偒傛偆偑側偄偺偱丄default偱偁傞偙偙偵摓払偟傑偡丏
default働乕僗傪擔忢揑偵棙梡偡傞偲偄偆丄偙偆偄偆僔乕働儞僒偼斀懃偱偡偺偱丄奆偝傫偼傗傜側偄傛偆偵偟傑偟傚偆丏偱偼側傫偱default偑偁傞偺偐偲偄偆偲丄揹尮搳擖捈屻偵僔乕働儞僗亖俀俆俆偲偐偁傝偊側偄悢帤偵側偭偰偟傑偆儕僗僋傪夞旔偡傞偺偑栚揑側傫偱偡丏
夵傔偰丄儌僯僞LED傪徚摂偟丄俫僽儕僢僕傪僛儘偵偟偰偄傞偺偱丄奜尒忋偼側偵傕傗偭偰側偄偺偲摨偠偱偡丏
枛旜偱丄僔乕働儞僗亖侽
偵偟偰丄師偵嵍懁億僀儞僩僗僀僢僠偑憖嶌偝傟傞偺傪懸偪傑偡丏
default:
{
GPIO_WriteHigh(GPIOD,GPIO_PIN_7); // monitor
LED
GPIO_WriteHigh(GPIOD,GPIO_PIN_5); // monitor
LED
tmp =
GPIO_ReadInputData(GPIOB);
tmp = tmp &
0b01010101;
GPIO_Write(GPIOB, tmp); // actuator
off
seqL=0;
break;
}
仠塃懁億僀儞僩愗懼僗僀僢僠傪惂屼偡傞僔乕働儞僒偱偡丏傗偭偰偄傞偙偲偼丄嵍懁億僀儞僩愗懼僗僀僢僠偲摨偠側偺偱夝愢偼妱垽偟傑偡丏堎側傞偺偼丄俫僽儕僢僕偺惂屼怣崋慄偑丄GPIOD
bit6420 偱偁傞偲偙傠偩偗偱偡丏
switch(seqR){
stm8_interrupt_vector.c
仠僾儘僕僃僋僩傪嶌偭偨偲偒偵丄帺摦揑偵惗惉偝傟傞僼傽僀儖偱偡偑丄堦晹廋惓偟傑偡丏
仠main.c偱掕媊偟偨妱傝崬傒張棟梡偺娭悢傪extern偟偰偍偒傑偡丏
extern @far @interrupt void
Tim2Update_isr(void);
仠僞僀儅俀偺妱傝崬傒怣崋偼IRQ13偵愙懕偝傟偰偄傑偡偺偱丄妱傝崬傒儖乕僠儞傪丄IRQ13偵僸儌晅偗偟偰偍偒傑偡丏
{0x82, Tim2Update_isr}, /* irq13 */
stm8s.h
僾儘僕僃僋僩傪嶌偭偨偲偒偵丄帺摦揑偵惗惉偝傟傞僼傽僀儖偱偡偑丄堦晹廋惓偟傑偡丏
/* #define STM8S208 */
/* #define STM8S207 */
#define
STM8S105
偙傟偺僐儊儞僩傪奜偟偰丄STM8S105偱偁傞偲愰尵偟傑偡
/* #define STM8S103 */
/*
#define STM8S903 */
stm8s_conf.h
僾儘僕僃僋僩傪嶌偭偨偲偒偵丄帺摦揑偵惗惉偝傟傞僼傽僀儖偱偡偑丄堦晹廋惓偟傑偡丏
#define _CLK
(1)
俥倂儔僀僽儔儕傪偮偐偆儁儕僼僃儔儖偺僐儊儞僩傪奜偟偰偍偒傑偡
#define _GPIO (1)
#define _TIM2
(1)