
| �p���X���U��@�\ |
���g�� |
10Hz�`200kHz |
| �f���[�e�B |
1%�`99% |
|
| �o�̓s�� |
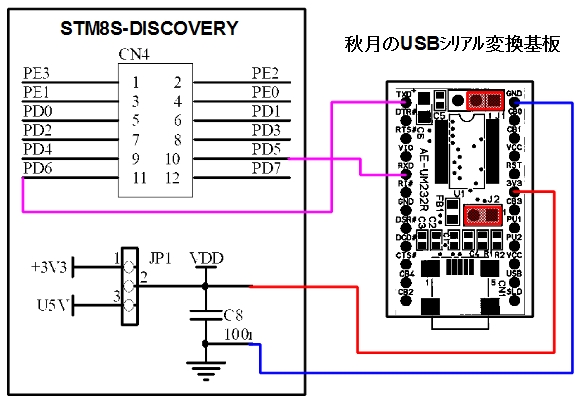
TIM2_CH1 PD4 (45pin) (CN4-9) �{�o�� TIM2_CH2 PD3 (44pin) (CN4-8) �|�o�� |
|
| ���g���J�E���^�@�\ |
���g���\�� |
��P�b���ɕ\�� |
| �f���[�e�B�\�� |
��P�b���ɕ\�� | |
| ���̓s�� |
TIM1_CH1 PC1 (26pin) (CN2-2) | |
| �\�� |
PC��Terminal soft��� |
|
| COM PORT �p�����[�^ |
115200bps 8bit odd-parity |
|
| ���g���\���C���W�P�[�^ |
LED |
|
| �R�}���h |
���g���ݒ�R�}���h |
f 1000�� ���g��1000Hz |
| duty�ݒ�R�}���h |
d 33�� duty��33% |
|
| verbose���[�h�R�}���h |
v�� verbose�^��verbose���g�O�� |
| TIM1 |
���g���J�E���^��H |
���荞�݂��� |
| TIM2 |
�p���X���U���H |
|
| TIM3 |
PC��Terminal��ʂ֕\������C���^�[�o�� |
���荞�݂��� |
| UART |
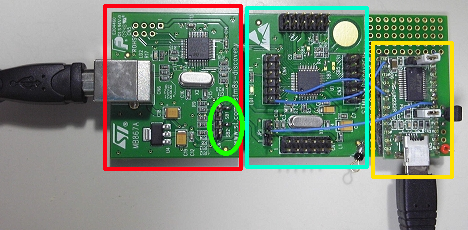
PC�Ƃ̒ʐM�p |
���荞�݂��� |
| clock |
�O��16MHz�������g�p(HSE) |

| TIM1 input capture���荞�� |
�P�Q�� |
�O���s���ɓ��͂����p���X�M���̎������J�E���g����D �p���X�M���̂P�������ƂɊ��荞�݂�������D TIM1�𗘗p����̂ŁA16bit�J�E���^�ŁA�N���b�N��16MHz�ł���D ����l�́A�P�����̒����ƁAHIGH��Ԃ̒����ł���D ���荞�݂������邲�ƂɁA���茋�ʂ�TIM1_ICvalue�Ƃ������̕ϐ��Ɋi�[����D __________|~~~~~~~|_______________|~~~~~~~|__________ <-----------------------> TIM1_ICvalue1 <-------> TIM1_ICvalue2 |
| TIM3 update���荞�� |
�P�T�� |
PC���terminal��ʂ֕\������C���^�[�o�����������P�b�̃^�C�}�D �����ł́A16MHz��1024��10000��1.54Hz �̊��荞�݂�������D |
| UART��M���荞�� |
�Q�P�� |
UART����������M�����犄�荞�݂�������D |






| ��P���� | TIM1_CH1����̓s���ɐݒ肵�Ă��܂� |
| ��Q���� | positive�G�b�W�ŃJ�E���g�J�n�ɐݒ肵�Ă��܂� |
| ��R���� | InputCapture1��InputCapture2���t�]������悤�ȋ@�\�ł����ATIM1_ICSELECTION_DIRECTTI ���������Ă��������ł��傤 |
| ��S���� | ���荞�ݕp�x�����������Ƃ��Ɏg���܂��D �������������Ƃ��́A�����Ă��P�������Ɋ��荞�݂������܂��D ����ƁATIM1_CH1�ɓ��͂����M����100Hz��������10mSec���ƂɊ��荞�݂��������܂����A10kHz��������100uSec���ƂɊ��荞�݂��������܂��D �������A100uSec���ƂɊ��荞�ݏ�������͖̂����ł��DSTM8S������Ȃɍ����ɏ����o����������܂���D �Ȃ̂ŁATIM1_CH1�ɓ��͂����M�����Ԉ����Ί��荞�݊Ԋu�������Ȃ��ď�����킯�ł��D �������������̒x���̓\�t�g�E�G�A�ŏ�������ꍇ�ɂ͔����悤������܂���D �ǂ����Ă�100kHz�̂P�������ɂ�������Ƒ��肵�����Ȃ�AFPGA���g���ď�hardware�������邵���Ȃ��ł��傤�D ���āA���̈����̑I�����́A�����Ȃ��Ă��܂��D���̈����͏d�v�ł��D TIM1_ICPSC_DIV1 �Ԉ����Ȃ� TIM1_ICPSC_DIV2 �P�Ԉ��� �i�Q�����ł͂Ȃ��̂Œ��ӂ��܂��傤�j TIM1_ICPSC_DIV4 �R�Ԉ��� TIM1_ICPSC_DIV8 �V�Ԉ��� |
| ��T���� | �O���s��������͂����M���ɂ̓m�C�Y������Ă��邱�Ƃ�����̂ŁA�듮�������邽�߂Ƀt�B���^��}������ꍇ�ɂ��̈����Őݒ肵�܂��D ���̉�H��10Hz�`200kHz�܂ł̊O�����͂��T�|�[�g���܂��̂ŁA���̈������[���ɂ���ꍇ�́A���͎��g�������W�ɉ�����1�`15���œK������K�v�ɔ����܂��D����̓v���O���~���O������̂ŏȗ����܂����D �O�F �t�B���^�Ȃ� �P�F fMASTER�łQ�N���b�N��ɍă`�F�b�N �Q�F fMASTER�łS�N���b�N��ɍă`�F�b�N �R�F fMASTER��8�N���b�N��ɍă`�F�b�N �S�F fMASTER/2��6�N���b�N��ɍă`�F�b�N �T�F fMASTER/2��8�N���b�N��ɍă`�F�b�N �U�F fMASTER/4��6�N���b�N��ɍă`�F�b�N �V�F fMASTER/4��8�N���b�N��ɍă`�F�b�N �W�F fMASTER/8��6�N���b�N��ɍă`�F�b�N �X�F fMASTER/8��8�N���b�N��ɍă`�F�b�N �P�O�F fMASTER/16��5�N���b�N��ɍă`�F�b�N �P�P�F fMASTER/16��6�N���b�N��ɍă`�F�b�N �P�Q�F fMASTER/16��8�N���b�N��ɍă`�F�b�N �P�R�F fMASTER/32��5�N���b�N��ɍă`�F�b�N �P�S�F fMASTER/32��6�N���b�N��ɍă`�F�b�N �P�T�F fMASTER/32��8�N���b�N��ɍă`�F�b�N (��MASTER=16MH���̂Ƃ���16uSec��ɍă`�F�b�N) |
